![]()
VIP Program at Howard University
Howard University
Washington, DC 20059
Coordinator: Dr. Charles Kim (CKIM@HOWARD.EDU)
This program is sponsored by The Leona M. and Harry B. Helmsley Charitable Trust as part of VIP Consortium Project (lead institution - Georgia Tech) to drive systemic reform of STEM education. Additional financial support, especially for Senior Design class projects, is generously made by Northrop Grumman Corp.
* How to Join?: If you want to join one of the teams below, contact Project Advisor (via email) or the VIP Coordinator (Dr. Charles Kim) via eamil ckim@howard.edu.
Any question can be directed to the VIP coordinator at ckim@howard.edu. Anyone, yeah anyone, can join.
Requirements for VIP Participants
| Requirements | Resources |
| 1. Approval
from Team Advisor (use Team Contract From -- See the right column) 2. Weekly Team Meeting Participation & Meeting Records 3. Participation in Semester-End Team Presentation (last week of the semester) 4. Submission of Survey (last week of each semester) 5. Submission of 1-minute video (or audio) clip of Elevator Pitch (Last week of the semester) |
* VIP
Team Contract Form
(pdf fillable), and a
Sample Contract * VIP Weekly Meeting Recording Form * VIP Survey (See below) at the end of the semester * Elevator Pitch & How to Prepare for it? * VIP Presentation Tips |
 (Survey is conducted at the end of each semester)
(Survey is conducted at the end of each semester)
HOWARD VIP Teams (2018-2019 Academic Year) Link to 2015-2016,2016-2017, 2017-2018, Year
| Project Team | Advisor/Contact | Project Description | Looking for Students in the followin major (but not limited to) |
| SLatE8 (since Fall 2014) | Advisor: Dr.
Mamadoue Wade (Electrical Engineering) Email:
mamadou.wade@bison.howard.edu |
Sign Language
to English.
More and
further more www.VIPatSlate8.html |
EE, CpE, CS, ME, MATH |
| Wireless Sensor Network (from Spring 2016) |
Advisor:
Dr.
Hassan Salmani (Computer Eng) Contact: Dr. Hassan Salmani (Computer Eng) at hassan.salmani@howard.edu |
Wireless
sensor network development for temperature sensing.
More
and
further more |
EE, CpE, CS, ME |
| Terminator (since Fall 2015) |
Advisor: Dr. Charles Kim
(Electrical Eng) ckim@Howard.edu Graduate Assistant: Derrick Anang Email: derrickann23@gmail.com ECE Sr. Team Leader: Charles Robinson. Email: charles.robinson1015@yahoo.com |
Project Description:
Team Terminator’s new project focuses on developing a Chess playing
robot that relies on camera inputs to identify a chess board and a
mechanical arm to move the chess pieces and on machine learning
principles for ideal victory paths for the robot. This project aims to
cover various engineering fields and expose participants to long term
research in addition to applied and collaborative engineering
environments. While a robot that can play a game of chess on its own is
the end goal, for
this academic year, we will a robot which plays the game of Tic
Tac Toe.
In subsequent years, we will gradually
incorporate new features to achieve the end goal of building a robot
which plays chess. The project will have mechanical, electrical, and
programming aspects.
|
EE, CpE, CS, ME,
Previous Project (presently closed):This project aims to create and build inexpensive prosthetics by 3-D printing which can be controlled by actions signals from the brain.  www.VIPatProsthetics3.html |
|
Seismolator - "Building a magnetic levitation platform as an ideal
seismic isolator" (since Fall 2016) |
Advisor: Dr. Claudia Marin
(Civil Eng) cmarin@howard.edu Technical Advisor: Dr. Charles Kim (Electrical Engineering) ckim@howard.edu Undergraduate Assistant (CV) : Laxman Dahal (email: laxman.dahal@bison.howard.edu) |
Commonly used
seismic isolators at the base of buildings try to disconnect the
buildings from the ground to limit the transmission of damaging effects
of earthquakes to the building like hanging the structure on the air.
The link (LINK)
compares the responses of a seismically isolated and a non-isolated building.
An ideal seismic isolator will keep the isolated object floating on the air to avoid contact with the shaking ground, then the isolated body won't experience the dynamic effects of the earthquake. The mission of this project is to build a prototype magnetic levitation system to float an object of 1 lb weight to isolate it from a shake. More  www.VIPatSeismo.html |
CV, ME, EE, CpE |
| AutoMoe - "Resilient Autonomous/self-Driving Cars: A prototype" (sine Fall 2016) | Advisor:
Dr. Danda Rawat
(Computer Science) Contact: Dr. Danda Rawat (Computer Science) at danda.rawat@howard.edu ECE Sr. Team Leader: Satchin Campbell. Email: satchin.campbell@bison.howard.edu |
This project
aims to develop light weight cybersecurity schemes, privacy aware
communications, adaptive speed control, automatic braking, rerouting,
information sharing using wireless access technologies and display
vehicle's status information.
More and
further more |
EE, CpE, CS, ME |
| eTrike (since Fall 2017) |
Advisor: Dr.
Mamadoue Wade (Electrical Engineering) Email:
mamadou.wade@bison.howard.edu (Electrical
Eng) ECE Sr. Team Leader: India Burse. Email: bursekindia@gmail.com |
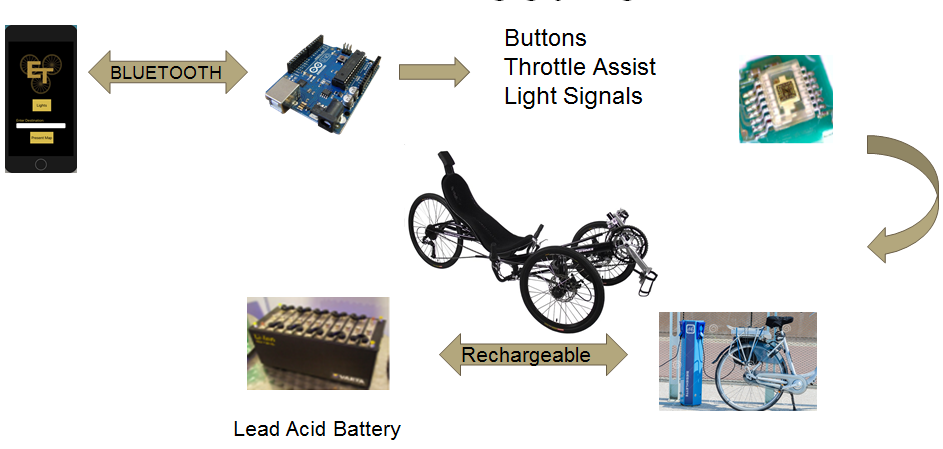 Restoration of a human-electric powered recumbent single seat tricycle - Design and build a battery pack and management system (BMS). More and further more |
EE, CpE, ME, CV |
| The EV 2.0 (from Fall 2017) |
Advisor: Dr. Emmanuel
Glakpe (Mechanical Eng) |
The goal of this project is to turn a hybrid
General Motors EV 1 into an self-driving electric car.
|
EE, ME, CHEM, CV, CpE, CS |
| Bioinformatics- Analysis of Rare Mutations Associated with Mental Disorders |
Advisor: Dr.
Shaolei Teng (Biology) Contact: Email to Dr. Teng at Shaolei.teng@howard.edu |
This project aims to analyze the protein mutations in hundreds of
schizophrenia risk genes to better understand the pathogenesis of the
disease. We will investigate the effects of rare non-synonymous
mutations rare missense mutations in DISC1 Interactome genes on protein
structures and functions. We will apply the sequence-based machine
learning approaches to identify the disease-causing mutations, estimate
the effects of mutations on protein stability, and discover the rare
mutations involved in post translational modifications. We will utilize
protein homology modeling, energy computing and molecular dynamics
simulation approaches to analyze the effects of missense mutations on
protein structure, protein stability and protein-protein interaction.
Our goal is to discover the mutations that increase the risk of
schizophrenia in minority populations and improve guideline for the
treatment of patients with schizophrenia. Introductory 1-pager |
BIOL, CS, CpE, CHEM |
| Bioinformatics- Prediction of Protein Sumoylation Sites using Deep Learning |
Advisor: Dr.
Shaolei Teng (Biology) Contact: Email to Dr. Teng at Shaolei.teng@howard.edu |
This project aims to apply new machine learning approach for predicting
sumoylation sites from protein sequence information. We will apply the
sequence-based deep learning approaches to identify the functional
important sites involved in this post translational modification. We
will develop the web servers and databases and make the online tools
accessible to the research community. Introductory 1-pager |
BIOL, CS, CpE, CHEM |
| Bioinformatics- Prediction of Internal Ribosome Entry Site using Machine Learning Approaches |
Advisor:
Dr.
Shaolei Teng (Biology) Contact:Email to Dr. Teng at Shaolei.teng@howard.edu |
This project aims to predict the Internal Ribosome Entry Sites (IRES) using new machine learning approaches, We will apply deep learning, random forests and support vector machines to construct the models. The accurate classifiers will be used to develop a new web server for IRES prediction. | BIOL, CS, CpE, CHEM |
| SLAM(FPGA-based SLAM) Solving localization and mapping problem for autonomous platforms (from Fall 2017) |
Advisor:
Dr.
Michaela E. Amoo (Computer Eng) Technical Advisor: Dr. Danda Rawat (Computer Science) Contact: Dr. Michaela Amoo at mamoo@howard.edu ECE Sr. Team Leader: Morganne Veal. Email: morg.anne.v88@gmail.com |
This research directly addresses the ever increasing technology gap
between demand for real-time computation and standard processor
performance by designing application-specific, Field Programmable Gate
Array (FPGA)-based processors to
tackle the Simultaneous Localization and Mapping (SLAM)
problem for autonomous platforms in unknown, and often hazardous,
environments, SLAM requires real-time 3-D modeling for path-planning and
real-time complex controllers to account for non-holonomicity, pose, and
movement. More
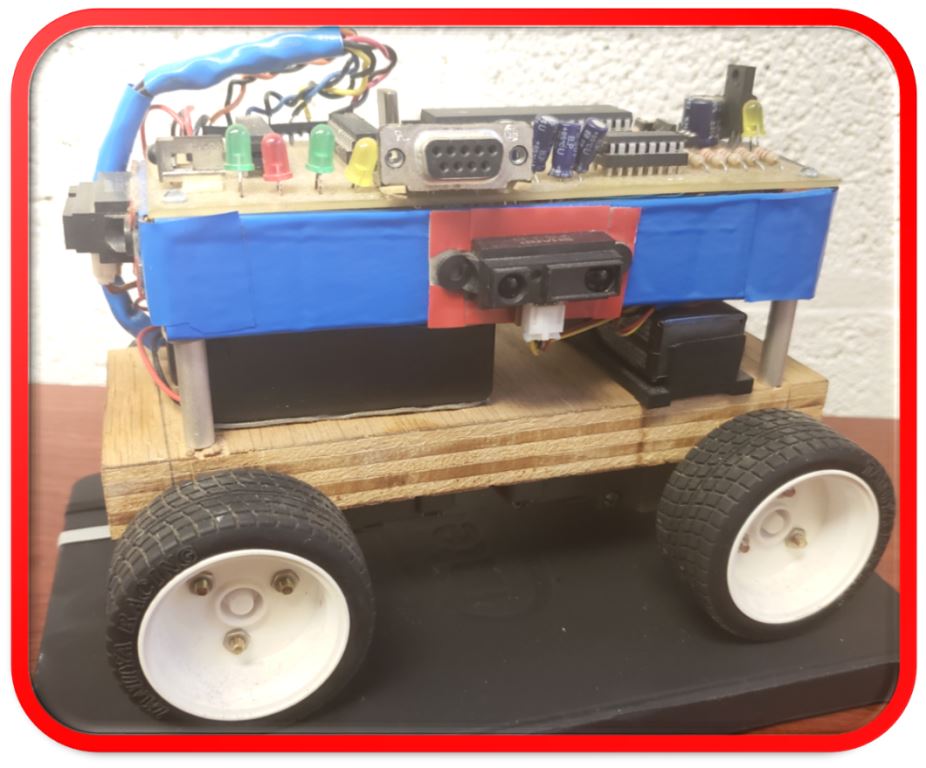
2018 Goals: Students will design and
build a COTS based autonomous wheeled platform with Bang Bang control,
PID controller, and sensor arrays (IR Rangers, Scanless Lidars), using
DSPACE and HIL (hardware in the loop). Final product must be capable of
autonomous navigation and establish a baseline for FPGA-based
implementation.
|
CpE, CS, ME, MATH |
| Deliveroid- A Delivery Robot (from Fall 2017) |
Advisor:
Dr. Charles Kim
(ckim@howard.edu Electrical Eng) Student Leader - Contact: David Quashie, Jr (Mechanical Eng) david.quashie@bison.howard.edu |
The long term goal of the project is to build a delivery robot which
performs errands between any two locations even in different floors of a building. A short term objective is to
build a 1st-gen robot which delivers to a location in the same floor.
Microcomputer coding, sensing, RFID or Wi-Fi and remote access, and
proximity detection would be integrated for the project.
More
and further
more
 |
EE, CpE, CS, ME |
| Graphone - A miniature high sensitive microphone based on graphene membrane (from Fall 2018) |
Advisor: Dr. Hyung
Bae (hyung.bae@howard.edu;
Mechanical Engineering) Contact: Jordan Fraser (ME Undergraduate research assistant) jordan.fraser@bison.howard.edu |
The goal of this project is to build a high
sensitive condenser microphone by using a nano-thin graphene-polymer
composite membrane. Conventional condenser microphones make use of
polymer-metal composite as a sensing medium which has tens of micron
thickness. In this research, nano-thin UV curable polymer layer will be
used together with multi-layer graphene membrane as a sensing medium.
The nano-think UV curable polymer film provides toughness to the
composite membrane. And the graphene layer serves as a water and gas
barrier for the polymer layer while providing the electrical
conductivity to the membrane. The size of the proposed microphone is
significantly smaller than that of conventional condenser microphones
due to its nano-thin composite membrane. And the microphone has long
term stability and high sensitivity exploiting the unique
characteristics of the UV curable polymer (i.e. very low elastic
modulus: 56 MPa) and the graphene layer (i.e. excellent water and gas
barrier). The proposed microphone will be built directly on a printed
circuit board (PCB) for the simplicity of sensor configuration. |
Looking for 2 ME students and 2 EE students to iniiate the project |
| Sandia Integrated Sensor - Benefitting Real-time monitoring (from Fall 2018) |
Advisor: Dr. Grant
Warner (g_warner@howard.edu; Mechanical Engineering) ECE Sr. Team Leader: Hakeem Thomas Email: hakeemthomas10@gmail.com |
Design, build, and
test a fully integrated sensing device, report and present all results
to the Sandia mentors. The device is required to sense the environments
with vibration, light irradiation, temperature, relative humidity,
linear acceleration, orientation, proximity, air composition, and shock.
The device
will be
evaluated on its; ease of integration
of the hardware and software, ability to accurately sense environments,
volumetric
footprint, power usage, date-rate,
cost, weight-to-capability ratio, uses of additively manufactured
components, novelty, and robustness. |
ME, EE, CpE, CS, CHEM |